Các nhà nghiên cứu từ Trường Kỹ thuật và Khoa học Ứng dụng (SEAS) của Harvard đã phát triển một loại robot thân mềm thế hệ mới lấy cảm hứng từ rắn, nhanh hơn và chính xác hơn so với phiên bản cũ.

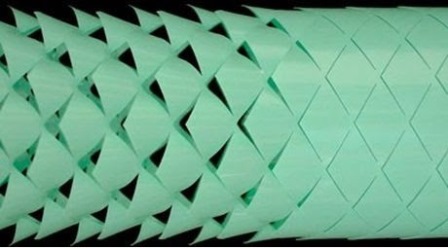
Robot được chế tạo bằng kirigami - một nghề làm giấy của Nhật Bản dựa trên các vết cắt để thay đổi các thuộc tính của vật liệu. Khi robot kéo dài, bề mặt kirigami "bật lên" thành một bề mặt có kết cấu 3D, bám chặt mặt đất giống như da rắn.
Robot thế hệ đầu tiên đã sử dụng một tấm kirigami phẳng, chúng biến đổi đồng đều khi kéo dài. Robot mới có lớp vỏ có thể lập trình, có nghĩa là các vết cắt kirigami có thể bật lên như mong muốn, cải thiện tốc độ và độ chính xác của robot.
Đây là một ví dụ đầu tiên về cấu trúc kirigami với các biến dạng bật lên không đồng nhất, Ahmad Rafsanć, một nghiên cứu sinh sau tiến sĩ tại SEAS và là tác giả của nghiên cứu cho biết. Trong kirigami phẳng, sự bật lên là liên tục, nghĩa là mọi thứ bật lên cùng một lúc. Nhưng trong vỏ kirigami, sự bật lên là không liên tục. Loại điều khiển chuyển đổi hình dạng này có thể được sử dụng để thiết kế bề mặt phản ứng và da thông minh thay đổi theo yêu cầu trong kết cấu và hình thái.
Nghiên cứu mới kết hợp hai tính chất của vật liệu - kích thước của vết cắt và độ cong của tấm. Bằng cách kiểm soát các tính năng này, các nhà nghiên cứu có thể lập trình sự lan truyền truyền động của sự bật lên từ đầu này sang đầu khác, hoặc kiểm sự bật lên cục bộ.
Trong tương lai, các nhà nghiên cứu muốn nhắm đến sự phát triển một mô hình thiết kế nghịch đảo cho các biến dạng phức tạp hơn.
Theo NASATI